VIOLAZIONE DEL PRINCIPIO DI
AZIONE E REAZIONE PER UNA BASE
PERMANENTE SULLA LUNA
OVVERO IL
KNOW-HOW della PROPULSIONE NON NEWTONIANA
(PNN) DOPO IL DEPOSITO DEL BREVETTO DEL PROTOTIPO F432 NELL’OTTOBRE 2020
Di EMIDIO
LAURETI

F432 il prototipo PNN con involucro aperto
Introduzione
Da più di
50 anni (Tempi del progetto Apollo 11 con sbarco sulla Luna nel Luglio 1969) assistiamo
ancora al proposito irrealizzato di stabilire un avamposto
permanente umano sulla Luna. L’impossibilità fisica di mantenere purtroppo una base permanente sulla Luna è semplicemente dovuta al fatto che un razzo
deve portare con se la massa da espellere per andare e tornare dalla Luna. In
sintesi l’Apollo 11 è tornato (in ammaraggio) con meno dl 99% della massa di
partenza. Per fare un esempio pratico è come se si fa un viaggio in auto e si
ritorna a casa con il solo sterzo. Peggio per portare e mantenere in vita umani
sulla Luna occorrono come minimo
centinaia di tonnellate di materiali tra
cui il cibo e acqua per lunga durata . Cosa che la missilistica non riesce
ancora a fare data la massa enorme che
dove trasportare.
Semplicemente
dovremmo usare un sistema di propulsione diverso da un razzo ovvero PNN (Propulsione
Non Newtoniana) cioè fare un sistema di
propulsione senza espulsione di massa di reazione.
In
pratica quello che molti chiamano reactionless drive o propellantless
propulsion.
Ma questo
viola il principio di azione e reazione di Newton ed è considerato
ufficialmente tuttora impossibile anche se viene considerato non del tutto illogico
a livello elettrodinamico www.asps.it/pnndatabase.htm . E
questo anche perchè l’elettrodinamica non era conosciuta ai tempi di Newton.
Ora
noi dell’ASPS (Associazione Sviluppo Propulsione Spaziale) www.asps.it pensiamo di aver risolto questo
problema con la PNN (Propulsione Non Newtoniana) o meglio di averne impostato le basi per un
successivo più ampio e profondo sviluppo.
I
dettagli essenziali teorici e sperimentali della PNN Sperimentale (disvelata
dopo oltre 20 anni di sperimentazione
secretata) saranno dati in questo
comunicato rimandando alle url www.asps.it e
https://neolegesmotus.com/2020/11/02/field-self-interaction-electromagnetic-thruster/
( In quest’ultima url sono presenti
vari video più recenti) per più ampi dettagli.
Saranno
date SOPRATTUTTO informazioni su come
ripetere esperimenti di base della PNN se si dispone di un laboratorio di
elettrodinamica con amplificatori di
potenza di almeno 500 watt , i relativi accessori e un altra dote essenziale : molta pazienza .
Solo
riproducendo i test di base della PNN ciò che è incredibile sarà credibile
PROPULSORE
ELETTROMAGNETICO AD AUTOINTERAZIONE DI CAMPO
Riassunto
:
Si descrive un sistema di propulsione che con correnti variabili e
attraverso l’interazione elettromagnetica reciproca di alcune sue parti su
altre sue parti produce risultante di spinta in una stessa direzione e verso
senza espulsione di massa di reazione.
Sia dato un dipolo a V, alimentato attraverso un cavo coassiale CX con il
feedpoint al centro dei due bracci A e B come in fig.1 . E’ superfluo
aggiungere che in un dipolo a mezz’onda
la corrente oscilla in modo sinusoidale ovvero avanti e indietro nei due
bracci.
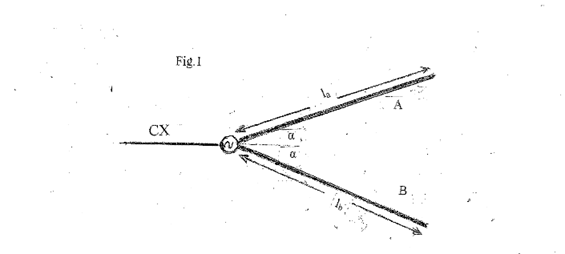
Data una frequenza di
alimentazione la lunghezza dei bracci dovrà essere tale che variando la
lunghezza degli stessi si trovi una opportuna frequenza di risonanza. L’angolo
2 alfa è l’angolo al vertice del dipolo dove alfa + alfa sono gli angoli
formati dalla bisettrice all’angolo al vertice del dipolo a V. L’angolo al
vertice teoricamente può essere di qualunque ampiezza tra 0 gradi e 180 gradi.
La scelta dell’angolo sarà determinata dall’efficienza dell’interazione
reciproca tra i due bracci.
Chiameremo pertanto i bracci del dipolo il braccio A e il braccio B Ma comunque
la cosa essenziale è che i due bracci emettendo onde elettromagnetiche possano
interagire fra di loro con il campo magnetico emesso in questo senso : l’onda
e.m. emessa del braccio A investe il braccio B e l’onda e.m. emessa dal braccio
B investe il braccio A determinando ,con la corrente nei bracci come in fig.2 e
fig.3 delle forze di Lorentz , ovvero una auto interazione tra i 2 circuiti
aperti A e B .
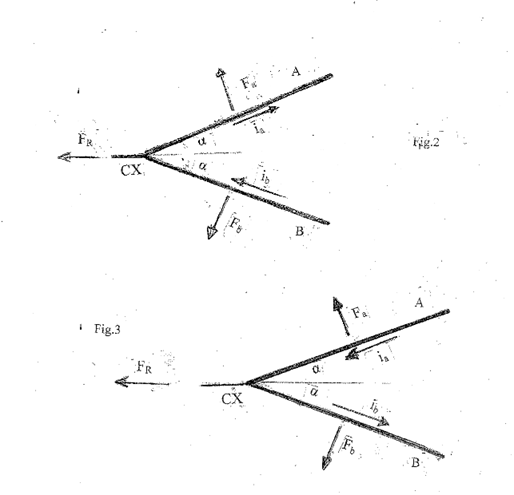
Il campo magnetico della
corrente ia variabile circolante nel braccio A determinerà un campo magnetico Ba
incidente normalmente sul braccio lungo lb e quindi una forza di
Lorentz di tipo Fb = ib lb Ba
normale al braccio B dove scorre corrente ib . Il vettore di tale
forza Fb giace nel piano determinato dai due bracci del dipolo a V.
Identicamente il campo magnetico Bb della corrente variabile ib
circolante nel braccio lungo lb determinerà un campo magnetico
incidente normalmente sul braccio la dove scorre corrente ia e
quindi una forza di Lorentz di tipo Fa = ia la
Bb normale al braccio A. Il vettore di tale forza giace nel piano
determinato dai due bracci del dipolo a V. I due campi magnetici incidenti sui
bracci sono normali al piano determinato dai bracci.
Entrambe le forze in
ogni mezzo ciclo della corrente oscillante,e in tutti quelli in sequenza,
saranno sempre fra loro repulsive ovvero tendenti a far aumentare l’angolo al
vertice del dipolo a V e dirette verso l’esterno dei bracci e normalmente ai
bracci. Posto che in modulo Fa e Fb siano uguali a F la forza risultante Fr
sarà 2Fsen(alfa) e sarà diretta nella direzione della bisettrice nel verso che
va dall’angolo 2alfa verso l’angolo
esterno dove l’angolo è maggiore di 180 gradi. In tutti i cicli di oscillazione
della corrente nel dipolo Fr = 2Fsen(alfa)
Fr è dunque il vettore forza risultante di due vettori Fa e Fb agente lungo
la direzione della bisettrice con verso dall’angolo interno a quello esterno
del dipolo a V come indicato nel fig.2 e fig.3
Ogni braccio del sistema a V è fatto con conduttori composti di molti fili
sottili smaltati e serrati in parallelo tipo Litz Wire LW al fine
dell’abbassamento dell’impedenza. Sempre al fine dell’abbassamento
dell’impedenza vengono posizionate lungo ciascun braccio delle ferriti.
Le ferriti hanno anche il compito di cambiare la permeabilità magnetica della
zona di interazione in modo da intensificare i campi magnetici e quindi le
forze di tipo magnetico sui bracci e avere una risultante con spinta maggiore.
Soprattutto al vertice della V in cui i due conduttori si divaricano e sono più
vicini deve essere massimizzata corrente e permeabilità magnetica delle
ferriti.

Il Prototipo
PNN F432 con rivestimento e operante a
432 Mhz
Il
sistema propulsivo risulterà quindi più efficiente se viene abbassata
l’impedenza onde avere più corrente nei due bracci e campi magnetici più
potenti. Debbono essere usate quindi ferriti idonee per avere quello che serve.

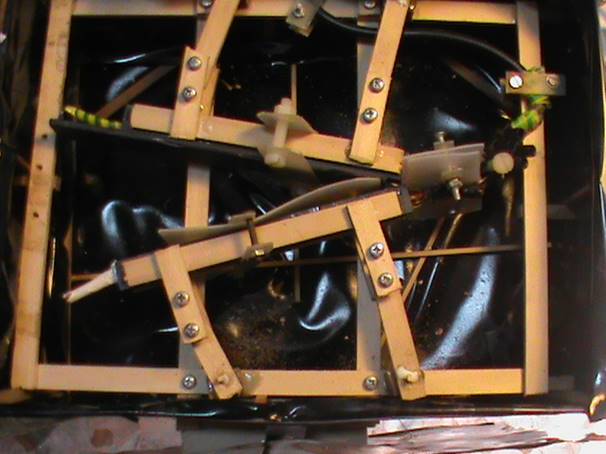
L’interno del prototipo F432 con ferriti e Litz Wire
come bracci
In figura 4 viene data
descrizione di un propulsore a V con angolo di 28,38 gradi tra i bracci, con
ferriti allocate sui bracci e con bracci lunghi 155 mm e formati da Litz Wire e
frequenza operativa intorno ai 432 Mhz .
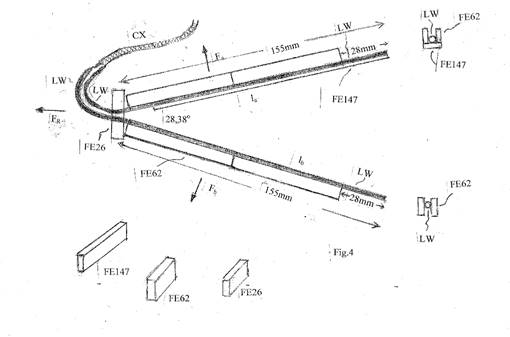
In fig.4
sono descritte le ferriti e il modo in cui vengono montate sui bracci.
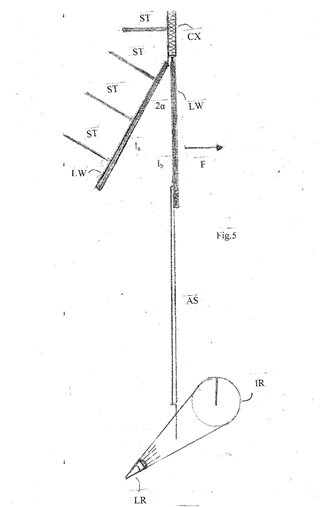
TEST DI
MISURA DELLA SPINTA
Al fine di valutare la
forza che si esercita su ciascun braccio il sistema viene dislocato come in
figura 5.
Ovvero all’uscita del cavo coassiale CX al braccio la viene appeso una lunga
astina di materiale non conduttivo che si posiziona verticalmente nella stessa
direzione della forza di gravità e può oscillare data la flessibilità dei Litz
Wire mentre l’altro braccio lb viene tenuto bloccato con le staffe ST fino a
formare un angolo 2alfa con il precedente braccio. Naturalmente il tutto va
tarato bene e va anche rammentata la seguente distinzione fondamentale : misurare
una forza in regime newtoniano non è la stessa cosa di misurarla in regime NON
newtoniano.
L’angolo scelto tra i bracci in genere è fra i 20 gradi e 40 a gradi anche se
teoricamente potrebbe essere compreso tra 0 gradi e 180 gradi.
Le ferriti (non disegnate in fig.5) sui bracci vengono dislocate in modo da non
intralciare il movimento del braccio mobile verticale allungato con l’astina
non conduttiva e con all’estremo un indice. L’indice è illuminato nella parte
bassa dell’astina da un raggio laser che allargato da una lente darà in base
allo spostamento dell’indice una quantificazione dell’intensità della forza F
in base alle leggi del pendolo. L’astina è lunga circa 1 metro. Il movimento
del braccio mobile verticale attaccato all’astina sarà sempre tendente ad
aumentare l’angolo 2alfa tra i due bracci.
PRIME CONSIDERAZIONI
FINALI
Una riflessione che per me è più ironica che seria.
Per
anni la comunità scientifica è stata in preda (e forse lo è tuttora) a
discussioni circa il funzionamento o meno di un dispositivo reactionless :l’emdrive
(una cosa un po comica perché era l’equivalente della costruzione/osservazione
di un motore a scoppio ignorandone i principi di funzionamento). Ora alla luce
della pnn la sua eventuale spinta è a mio parere del tutto casuale perchè basta
vedere il dato caotico e dei campi magnetici su quella che viene chiamata
“tazza”. Ora dove c’è campo magnetico locale c’è corrente e c’è pure ,guarda
caso, correnti locali aperte su superfici chiuse (nel dettaglio ci sono molti
parti di caotici circuiti aperti) specialmente sulle angolature ( spigoli acuti
o ottusi o retti) delle estremità del tronco di cono della tazza.
Che voglio dire ? che se c’era spinta era sempre determinata tra INTERAZIONI
fra correnti da circuito aperto e interazione basata su forza di Lorentz o
meglio risultanti di
vettori forza a numero ignoto di potenziali circuiti.
Come ho detto molte volte , dal mio punto di vista (di cui non ho mai dato i
dettagli suddetti) l’emdrive assomigliava una inefficiente ,caotica ,casuale
PNN con le ruote quadrate :)
[EL1] In base a quanto descritto sopra
circa il know-how della PNN di cui è stato depositato brevetto sono stati
elaborati nel corso di 20 anni diversi tipi di propulsori PNN (in totale almeno
11 )….
L’ultimo denominato PNN di CLASSE SUBITAM in teoria potrebbe decollare da terra
se avesse pure insieme ad altri costosi e ESSENZIALI dettagli, come alimentatore
primario per l’energia elettrica un reattore nucleare.
La “Subitam” ovvero la PNN SUPERPOTENZIATA DI F432 potrebbe colonizzare A FINI
INDUSTRIALI la Luna e Marte se si rinunciasse a perdere tempo e denaro con gli
artritici missili simili a supposte ciclopiche perdenti massa di reazione in
modo inevitabilmente catastrofico durante il viaggio .
Secondo la nostra valutazione si colonizza lo spazio solo superando la
meccanica newtoniana con navi spaziali più veloci , che cambiano tutti e 3 i
principi di Newton ……… perché ovviamente cambiando il principio di azione e reazione
cambiano anche gli altri 2 principi di Newton
(ma questo è un altro discorso).
Solo con sistemi di propulsione reactionless potenziati si può costruire una
nave spaziale NON PERDENTE MASSA .

Note
Aggiuntive:
- Un Road Show del know-how della PNN di
F432si è svolto a Roma il 31 Ottobre 2020 . E’ in
parte visibile su Facebook nella sezione ricerca digitando : PNN Propulsione Non Newtoniana
-
Una sintesi del Road Show del 31
Ottobre 2020 in inglese con un filmato esplicativo del principio di
funzionamento della PNN e altri video
|
https://neolegesmotus.com/2020/11/02/field-self-interaction-electromagnetic-thruster/ |
-Maggiori
informazioni nell’Url dell’ Associazione Sviluppo Propulsione Spaziale (ASPS)
e
di altre url collegate alla stessa